
HB型混合式步進電機馬達的結構與工作原理分析
混合式步進電機分三種:永磁式(PM) ,反應式(VR)和混合式(HB)。反應式步進一般為兩相,轉矩和體積較小,步進角一般為7.5度 或1.5度;永磁式步進一般為三相,可實現大轉矩輸出,步進角一般為1.5度,但噪聲和振動都很大。在歐美等發達國家80年代已被淘汰;混合式步進是指混合了永磁式和反應式的優點。
混合式(即HB型)步進電機有兩相、三相、五相式,轉子因與相數無關,而采用相同轉子,本文以兩相HB型混合式步進電機為例加以說明。HB型的名稱由其轉子結構得來,其轉子是PM型永磁步進電機與VR型變磁阻反應式步進電機轉子的復合體,故而也稱此類電機為為混合式步進電機。
本文主要介紹HB型混合式步進電機的結構和工作原理,具體的跟隨小編來了解一下。

HB型混合式步進電機的結構
HB型混合式步進電機結構為兩個導磁圓盤中間夾著一個永磁圓柱體軸向串在一起,兩個導磁圓盤的外圓齒節距相同,與前述的VR型可變磁阻反應式步進電機轉子結構相同,其兩個圓盤的齒錯開1/2齒距安裝,轉子圓柱永磁體軸向充磁一端為N極,另一端為S極。
此種電機轉子與前面敘述的PM型永磁步進電機轉子從結構來看,PM型轉子N極與S極分布于轉子外表面,要提高分辨率,就要提高極對數,通常20mm的直徑,轉子可配置24極,如再增加極數,會增大漏磁通,降低電磁轉矩;而HB型轉子N極與S極分布在兩個不同的軟磁圓盤上,因此可以增加轉子極數,從而提高分辨率,20mm的直徑可配置100個極,并且磁極磁化為軸向,N極與S極在裝配后兩極磁化,所以充磁簡單。
與轉子齒對應的定子極,主極內徑有與轉子齒節距相同的小齒,與轉子齒的磁通在氣隙處相互作用,能產生電磁轉矩。此種轉子的步進電機在近期被廣泛應用。
此種結構源自于1992年美國GE通用電氣公司的Karl Feiertag,取得美國專利的發電機。與現在的兩相HB型步進電機結構相同,當初是作為低速同步電機使用,其后,美國的Superior Electric公司和Sigma Instruments 公司開發出步距角為1.8°,轉子齒數為50的兩相HB型步進電機。
如下圖所示為定子為兩相繞組,轉子齒數50,1.8°的HB型混合式步進電機的剖視圖。為加大輸出轉矩,盡量加長了轉子軟磁磁極的軸向長度。
 下圖為HB型步進電機各結構示意圖:
下圖為HB型步進電機各結構示意圖: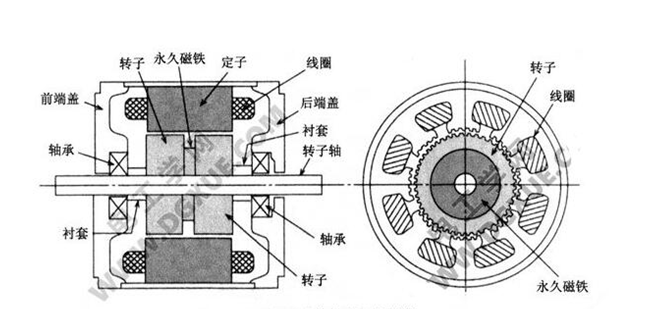
定子為8個磁極(放置繞組的主磁極)均勻分布,此8個磁極的內圓分布有與轉子齒距相同的齒,與轉子齒分布在氣隙兩邊。轉子齒多于定子齒。
線圈用繞線機直接繞制在樹脂注塑成型的槽絕緣骨架上,線圈繞好后安裝在磁極上。前、后端蓋采用鑄鋁材料,采用機械加工方法保證軸承座與安裝止口的同心度。通常HB型混合式步進電機的氣隙為0.05~0.1mm,由于氣隙小,所以控制各組件的加工精度相當重要。
轉子裝入定子和前后端蓋,確保氣隙均勻,永磁體的磁化方向為軸向,N、S極在兩端磁化,產生的磁力線方向如箭頭所示,為容易理解,簡化實際磁路為定子為4個主極與5個轉子齒(如下圖所示),此處省略了定子繞組。
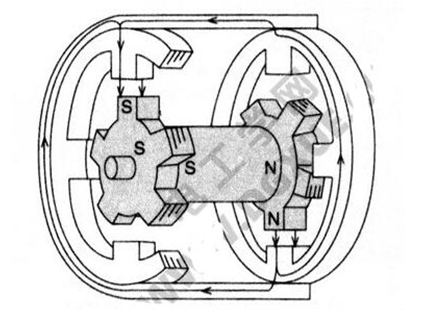
由于轉子的永久磁鐵的磁通在定子中變成交鏈磁通,當定子線圈流過電流時,根據弗萊明左手定則(I為電流,B為磁通密度,L為線圈軸向有效長度)產生電磁轉矩。2個導磁體夾著1個永磁體,轉子的齒位置互相相差1/2齒節距。轉子的磁通從N極出發,經過氣隙最小處(定轉子齒相對的地方)到定子磁路,再返回轉子的S極,磁路如箭頭所示。
上圖左側的轉子上部,右側的轉子下部產生吸引力,軸兩側產生力矩(此力是不平衡電磁力),轉子的旋轉受定子激磁線圈切換產生旋轉力。軸承的間隙會很容易產生振動。實際上定子主極為8個極,轉子齒數為偶數,目的是消除此不平衡電磁力。實際上與2個轉子齒部相對的定子,在軸向上并非是分開成兩個,而是采用硅鋼片疊壓而成一體。
HB型混合式步進電機工作原理
下圖描述了兩相HB型步進電機的工作原理。永久磁鐵使轉子產生N極和S極,由吸引力和排斥力產生電磁轉矩,兩相繞組假設為A相、B相、“杠A”相、“杠B”相。例如,A相和“杠A”相接通電源,根據右手螺旋法則產生相反的磁場。同樣,B相與“杠B”相也是如此。圖中,實線箭頭表示轉子磁通,虛線表示為其磁路磁通Фm。從轉子磁鐵的軸向圖看,轉子N極通過氣隙向下進入定子,通過定子磁極軸向穿過鐵心到達上面的定子磁極后,穿過氣隙回到轉子S極。下圖充分說明了HB型混合式步進電機的結構和工作原理。
轉子磁路中間為永久磁鐵,下側為N極,上側為S極。磁鐵的厚度方向磁通由上向下。開始狀態(a)為A相激磁,則“杠A”相極性相反,因此停在圖示位置,轉子與A相和“杠A”相的各一半對應,形成交鏈磁通Фm,如圖中虛線所示。
下一步,激磁相轉換到狀態(b),斷開A相激磁電流,接通B相激磁電流,則轉子向右移動1/4轉子齒距,運行到圖(b)的位置。
再一步,激磁相轉換到狀態(c),斷開B相激磁,接通“杠A”相激磁,則轉子從狀態(b)向右移動一步(1/4齒距)運行到狀態(c)的位置。同樣,激磁相換到狀態(d),斷開“杠A”相激磁,接通“杠B”相激磁,則轉子從狀態(c)向右移動一步(1/4齒距)運行到狀態(d)的位置。再一步,就返回狀態(a),依次不斷循環。
A4931的替代芯片---BLDC三相無刷預驅動--GC4931
GC4931F/S 是一款三相無刷直流電機預驅動芯片。 芯片可以驅動N型功率MOSFET,最高電源到 36V。芯片狀態切換邏輯受三個相位差為 120°的霍爾輸入確定。兼容替代A4931,MS4931芯片集成固定衰減時間的脈沖調制來控制電流并且抑制勵磁涌流;堵轉保護時間可調;過溫保護,過壓監測,同步整流等等。其中內置的同步整流器通過在衰減周期內,打開合適的低內阻的開關管以取代反向續流二極管來降低功耗。當芯片監測到過壓時芯片會關斷同步整流以減小變化電流引起的電源電壓波動。
GC4931F/S 的邏輯輸入腳有使能控制(ENABLE),方向控制(DIR),剎車控制(BRAKE);邏輯輸出腳有 FG1,FG2 與霍爾信號對應,可以用來監測轉動速度。
芯片工作溫度從-20~105℃。
封裝形式采用 5mmx5mm 的 QFN 28 腳,底部有散熱片。
GC4931F 工作電壓低至 4.7V,GC4931S
最低工作電壓在 7V. 
深圳市錦鋒科技有限公司為世芯一級代理,可提供技術支持,歡迎索樣13923795851!
- 上一篇:你必須要知道的MOS管幾個使用 2020/7/20
- 下一篇:你知道PCB板設計的幾大黃金法則嗎 2020/7/20
