
帶你全面了解步進電機簡介及工作示意圖
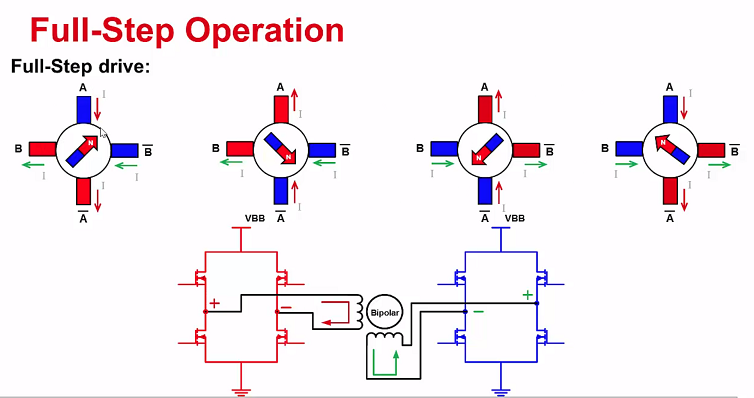
第一部分的話主要介紹步進電機本身 那另外一部分的話就是步進電機的電控啊 主要就是說步進電機的電流的一個調整功能 這一頁的話是步進電機的一個應用 步進電機是一個簡單的開環的 一個位置和速度的一個控制 那基于這個控制的話 我們可以想得到啊一些比較經典的一些應用 比如說監控里面的這個攝像頭啊 ATM 機 那冰箱里面的一些風門的一些控制 搖頭的那個這個燈的一個控制 那打印機 3D 打印機里面會有非常多的步進電機 而還包括這個流量控制 或者閥門控制里面的電機,它也是步進電機 另外的話就是這個工業里面的一些應用 比如說這個紡織機械的一些產品 那這個的話就是說步進電機 它的一個結構可以看到 OK 右上角,那步進電機的話分兩部分 中間這個的話是這個轉子 外面這個線圈的話是這個定子 OK 那它的轉子上面可以看到它開的這個齒槽 OK 它可以通過改變這個 定子線圈里面的這個電流的方向啊 產生這種磁場或者合成磁場 然后在驅動這個轉子的這個磁鐵旋轉 OK 那步進電機的話它有一些優缺點 它的優點的話就說非常啊成熟 或者說價格非常低廉的一個 開環的速度和位置的一個控制 然后也非常容易去實現它的控制 算法比較簡單 電機本身也是很可靠,OK 壽命也很長 然后它的這個扭矩也挺大 包括一些比較優秀的一些保持力矩等等 它的缺點的話就是說步進電機的話 其實從微觀來看的話,走一步停一步 所以它會有一些噪音的問題,震動的問題 那另外的話就是步進電機 它是動態響應度會差一些 所以它的一些速度上的話可能轉的效果不好 另外一個的話就是說這個大電感 或者說頻繁的這種換相的話 它會限制步進電機這個轉速 OK 步進電機的話 它的扭矩的紋波的話,它也會比較大一些 OK 然后步進電機的效率的話那肯定是低的 OK 這一頁的話是這個步進電機全步的一個啊 一個運行的一個示意圖 OK 可以看到,一般步進電機的話 主要現在目前是經典的話就是兩相步進 OK 兩相步進電機,A 相和 B 相 那給 A 相和 B 相 分別通不同方向的電的話 它其實會形成一個合成磁場 那從上面這個來看的話 它可以總共有四個方向的合成磁場 一個是右上那這個是右下,左下左上 那這是四個周期的話,剛好就是360度 就每一個的話是90度,那剛好走完這四步 那這里的每一步的話,我們叫一個大步 那一個周期的話就是四個大步 OK 這一頁的話是一個半步的一個運行示意圖 OK 半步的話其實分兩種 那你可以看先看左邊這個的話 就是2-1-2這種 那這個的話是在前面,看它全步的基礎上 它又加了一個就是說只通 A 相,B 相不通電 它只有一個方向,這是一個磁場方向 那另外一個的話 接下來就是 AB 相合成磁場上 再接下來只有 B 相通電 然后再下面的話就 AB 相合成,然后再循環 所以它這樣子的話是在這四個基礎上 又加了四個的 AB 和 A反 和 B反 OK ,那同時可以看到啊 因為這里面每個電流它是百分之百輸出的話 那這個 AB 合成的話 其實是B的大概根號二倍,1.4倍啊 所以你看到它每一步的話 其實每隔一步的話 它這個電流是不均勻的啊 就是一步小一步大,一步小一步大 OK 那右邊這種這像右下圖這個示意圖的話 其實是一種更為常見的 就是說我們人為地去控制這個電流的比例 那它目的是什么呢,比如說 A 到 AB AB 合成的話,它的磁場啊 它這個扭矩的大小跟這個 A 是一樣大 那就是說分別取 A 和 B 的根號1/2倍 大概就0.7多一些的這個電流 那合成 AB 的話就是跟 A 是一樣的 那下面 A反 和 B反,AB反 和 AB反 都是一樣 那這樣的話就是說它可以這個半步的話 都是在一個同心的一個圓里面 它的半徑都是一樣的,它的扭矩是恒定的 那這樣的話電機,步進電機轉的話就會更加平穩 OK 聲音的話也會更小一些 那在這個半步基礎上的話 我們如果要做更多的細分的話啊 這里有個示意圖,就是說舉個例子 以八分之一細分來話 那我們只截取這個一個圓形的 這個四分就是一個大步90度 那在一個大步90度里面的話 它分成了八個小步,就是從 step1 到 step8 你可以看到 123452678 等等 那每一步的話 它剛才說的我們要保持著恒定的扭矩的話 那每一步的 A 相和 B 相的 合成的電流的話都是一樣大的 那這個時候你就需要對 A 相的電流 B 相電流進行這樣的一個分檔 OK 那我們這樣保證它們倆啊 不管是在哪一步的合成電流都是一樣大的 OK 所以這里面的話 其實我們就做了一個這樣的分檔 OK 那如果把整個 A 相和 B 相電流波形 完整的拿出來看的話 可以看到 OK 那這里是 A 相這里是 B 相 它們相位的話差 90 度 那在每 1/4 啊,每90度的話,這是一個全步 那這里面全步里面的臺階數量 就是它的細分數量 OK 所以你可以看到步進,細分數越高的話 其實這個臺階的話其實是慢慢上漲 它的響應度是會慢一些的 那全步的話是會快一些,但全步帶來問題 你可以看到啊 它的這個震蕩會比較大一些 這里舉個例子的話是以 DRV8818 來為例啊 8818 的話是最多是支持 1/8 細分的 一個步進電機驅動器 OK 它本身可以配成八分之一細分 或者說 1/4、半步,或者全步 那不同的這個細分數的話 這個是它這個電流波形的一個示意圖 你可以看一下,那這個是全步 那半步的話,你可以看到 在這個 90 度周期里面就兩個臺階一樣 1/4 的話在這里就是 1234,那 1/8 的話 這個12345678 總共有八個步 所以說細分數越多的話 你可以看到它這個電機的這個每一步的話 它就是越接近于正弦波 OK 整個波形的話,就相對來說運行的更平穩 這一頁的話是步進電機細分的一個總結 那左邊的話是全步,右邊的是這個半步 全步里面的話,其實這邊的話是單相 單相的話現在其實用的很少 所以我們現在經常看的話都是兩相的步進電機 那它那個優缺點就是說 優點就是說比較其實全步的話扭矩是最大 如果是 AB 相合成百分之百最大輸出 如果你不去進行它的分檔或者限流 OK 那控制非常簡單,只有四個方向啊 它帶來的缺點就是說 它會有很大的步與步切換的這個噪音 OK 然后這個震動也會比較大一些 半步的話,前面那一頁也提到有兩種 一個是2-1-2這種 它是非圓周形的扭矩不一樣大的 OK 那這個當然它相對于全步來說 這些優點也是有的,就是說它因為它細分 步的精度會更高一些,會較少的一些震蕩啊 然后運行得更平穩,控制計時也挺簡單 唯一的一個缺點的話 就是說它這個扭矩的這個是不均勻的 這一步短一步長 OK 所以基于這個情況的話 我們就做了這個恒定轉矩啊 這是一個圓周性的這樣一個一個細分 那它的其它的好處的話 就在這個基礎上又增加了 它的好處的話,其實跟那個一樣 那唯一帶來的話就是說 因為如果你細分數越多的話 因為它是要合成一樣的這個電流大小 所以說它在比如說在零度或者在90度的話 那其中一項電流是非常小的 那這個時候的話就需要一個很小的 或者說很精確控制的一個電流 那下面這個的話是步進電機的一個總結 那不管是從全步、半步、1/4 到最高 到更高 250 的或更高,這個細分數的話 就是越高那你這個運行理論上的話 就轉動會越平穩,會越安靜一些 然后因為你的步數越高 那你每一個大步除以這個細分數 就是你每一個細分數的度數當然就會越小 所以它的精度會越高 OK 那另外一個的話 就是它這個噪音水平的話也會得到改善 OK 當然細分數越高的話 它就需要比較復雜或者是 高階的一些電流的控制功能 那這里面可能就需要比特數比較高的 這些 AD,DAC 啊等等 OK 那我們從這個頁開始來講一下 這個電流調整功能 那這個的話可以看到啊 就是說這是一個電流 那電流的話,其實一個線圈的話 它其實分兩部分 那這個是它的正常的工作或者充電的一個方式 那這個的話是放電啊 我們在 Decay 續流模式 再驅動再放電,再驅動再放電 OK ,那這里面有個 IFS 的話 就等于說我們這個限流值 那這個限流值的話是有個公式來計算 就是參考電壓除以這個內部有個小運放 內部增益 Av ,再乘以這個外部的采樣電阻 OK 那你這個當你這個采樣電阻的 這個參考電壓設定以后 這個 IFS 就是設定了 那當你這個線圈比,不管是 A 相和 B 相 當你工作的時候 對這個線圈進行電流方向的這個控制 當你下一個關掉 off 的時候 當到了這個電流的時候你就把它關掉 那這個時候就續流啊 因為這個線圈它也是一種電感啊 不會電流不會突變的來進行續流 當你下次再打開,當它掉下來之后 下次在一個 PWM 周期再打開的時候 它又上去,那又碰到這個 IFS 又下來 所以它就不斷地打開關掉,打開關掉 OK OK 那這個電流的這個,這個調整功能 前面講的那個細分 那這個細分的話就是 每 90 度里面的這個臺階的數量 那這個臺階是怎么做出來的話 其實就剛才用了我們這個電流調整功能 那這里面有多少個臺階 其實就取決于,你可以看下面這個圖 OK 參考電壓除于增益,和乘以這個采樣電阻 那采樣電阻增益都是固定的 那這個參考電壓外面的話你給定一個值的話 那只能通過一個 DAC 來產生這樣不同位 經過不同位數的 DAC 產生這樣的臺階 OK 那這個臺階的數量其實就是 DAC 的這個位數 舉個例子的話,如果 DAC 是三個比特的話 那剛好就是2的3次方,八個臺階 它就是八分之一細分 OK 如果是八比特的話 那就是二的八次方,256 個臺階 OK 所以它是通過 不管是內部還是外部的這個 DAC 然后提供這樣的分檔的這個參考電壓 然后對這個電流進行分檔 那這個步進電機的話 就是按照這個分檔來進行
步進電機工作示意圖如下:
- 上一篇:步進電機都有那些不同使用場合 2020/7/4
- 下一篇:BDC vs BLDC 有刷電機與無刷電機區別 2020/7/4
