
銻化銦InSb霍爾元件在無刷電機(jī)中的應(yīng)用
2020-7-10 17:25:12??????點(diǎn)擊:
根據(jù)人民對(duì)生活質(zhì)量的高要求,家電的節(jié)能、噪聲、環(huán)保等慢慢成為人們購買電器的一個(gè)重要因素,新型直流無刷電機(jī)應(yīng)運(yùn)而生,低噪音、環(huán)保、低能耗的特點(diǎn)使其成為家電電機(jī)的首選。
直流無刷電機(jī)中較為重要的部件就是霍爾,因?yàn)榛魻柧哂蟹墙佑|式,安全性高,壽命,高穩(wěn)定的優(yōu)點(diǎn),且能抗油污抗灰塵等不良環(huán)境帶來的影響。所以,霍爾在直流無刷電機(jī)中是關(guān)鍵部件,其作用是很大的。選擇霍爾的好壞,對(duì)直流無刷電機(jī)的品質(zhì)有著直接的影響。用銻化銦(InSb)半導(dǎo)體制成霍爾元件靈敏度最高,也是使用最為廣泛的霍爾元件。無刷電機(jī)中的霍爾傳感器裝置采用銻化銦(InSb)霍爾元件或銻化銦(InSb)霍爾開關(guān)電路。霍爾傳感器通常與外部放大器電路連接,霍爾傳感器電路直接驅(qū)動(dòng)電機(jī)繞組,大大簡(jiǎn)化了電路。
工作原理:無刷直流電機(jī)使用永磁轉(zhuǎn)子將所需數(shù)量的霍爾傳感器設(shè)備放置在定子的適當(dāng)位置。其輸出與定子繞組的相應(yīng)電源電路相連。當(dāng)轉(zhuǎn)子經(jīng)過霍爾傳感器裝置附近時(shí),永磁體轉(zhuǎn)子的磁場(chǎng)使勵(lì)磁霍爾傳感器裝置輸出電壓打開定子繞組電源電路,向相應(yīng)的定子繞組供電,產(chǎn)生與轉(zhuǎn)子磁場(chǎng)極性相同的磁場(chǎng),并排斥轉(zhuǎn)子繼續(xù)旋轉(zhuǎn)。在下一個(gè)位置,前一個(gè)位置的霍爾傳感器裝置停止工作,下一個(gè)霍爾傳感器裝置打開,使下一個(gè)繞組通電,產(chǎn)生排斥磁場(chǎng),使轉(zhuǎn)子繼續(xù)轉(zhuǎn)動(dòng)。這樣一個(gè)循環(huán)來維持馬達(dá)的工作。
在這里,霍爾傳感器裝置作為位置傳感器來檢測(cè)轉(zhuǎn)子磁極的位置。它的輸出使定子繞組電源電路通斷,同時(shí)也起開關(guān)的作用。當(dāng)轉(zhuǎn)子磁極離開時(shí),前霍爾傳感器裝置停止工作,下一個(gè)裝置開始工作,使轉(zhuǎn)子磁極始終面對(duì)推斥磁鐵。磁場(chǎng)和霍爾傳感器器件起到了定子電流換向的作用。
霍爾傳感器開關(guān)鎖定電路直接驅(qū)動(dòng)電機(jī)。當(dāng)磁場(chǎng)刺激鐵磁材料時(shí),由于其高磁導(dǎo)率、低磁阻,磁力線集中在材料中。當(dāng)材料平均時(shí),磁力線的分布也是平均的。如果材料中有缺陷,如缺陷處有裂紋、孔等,則磁力線會(huì)彎曲,局部磁場(chǎng)會(huì)發(fā)生畸變。這種畸變可以通過霍爾傳感器探頭、位置、性能(孔或裂紋)和尺寸(如深度、寬度等)來檢測(cè)。該缺陷可以通過數(shù)據(jù)處理來識(shí)別。
三相直流無刷電機(jī)原理

三相無刷直流電機(jī)常采用兩兩導(dǎo)通的方式工作,兩兩導(dǎo)通指任意時(shí)刻逆變器只有2只開關(guān)管開通。無刷直流電機(jī)需要根據(jù)轉(zhuǎn)子位置來切換工作狀態(tài),也就是說換相點(diǎn)是無刷直流電機(jī)正常工作必不可少的信息。圖1為三相無刷直流電機(jī)換相點(diǎn)示意圖,為便于理解,特給出了反電勢(shì)以及相電流波形,圖中ea,eb,ec代表三相相反電勢(shì),由圖可見,對(duì)于三相無刷直流電機(jī),每個(gè)電周期內(nèi)有6個(gè)不同的換相點(diǎn),也就是說每個(gè)電周期內(nèi)電機(jī)換相6次。

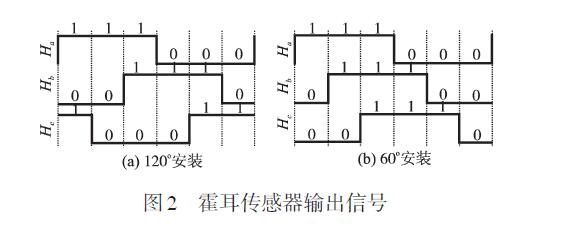
霍爾傳感器常用來檢測(cè)無刷直流電機(jī)換相點(diǎn)。三相無刷直流電機(jī)需要3 個(gè)霍爾傳感器來檢測(cè)6 個(gè)不同的位置,霍爾傳感器的安裝有120° 安裝和60° 安裝2 種方式,120° 安裝指3 個(gè)霍爾傳感器互差120° (電角度),而60°安裝指3 個(gè)霍爾傳感器互差60° (電角度),2 種安裝方法對(duì)應(yīng)霍爾傳感器的輸出信號(hào)如圖2 所示,圖2 中霍爾信號(hào)跳變的位置就是換相點(diǎn)。2 種安裝方式最大的區(qū)別在于采用60 ° 安裝時(shí)可以輸出“000”和“111”信號(hào),而120° 安裝則不會(huì)輸出這2 個(gè)信號(hào),通過這一點(diǎn)可以判斷霍爾傳感器的安裝方式。
不管采用哪種安裝方式,輸出的霍爾信號(hào)將每個(gè)電周期分為6 個(gè)區(qū)域,當(dāng)轉(zhuǎn)子轉(zhuǎn)到某個(gè)區(qū)域時(shí),特定的繞組通電,無刷直流電機(jī)即可正常運(yùn)行,若霍爾信號(hào)與繞組關(guān)系不準(zhǔn)確,電機(jī)將無法工作,甚至?xí)斐呻姍C(jī)或逆變器損壞。下面介紹一種無刷直流電機(jī)霍爾信號(hào)與繞組關(guān)系自學(xué)習(xí)方法。
三相直流無刷電機(jī)轉(zhuǎn)矩可以由下式來計(jì)算:
T =eaia + ebib + ecicω式中:ea ,eb ,ec 為三相相反電勢(shì);ia ,ib ,ic 為三相相電流;ω 為電機(jī)角速度。空載時(shí),在電機(jī)繞組中通以固定電流,電機(jī)轉(zhuǎn)子將轉(zhuǎn)到某一位置并停止,此時(shí)電機(jī)產(chǎn)生的轉(zhuǎn)矩零圖3中,Ⅰ~Ⅵ表示霍耳傳感器將電周期分成的6 個(gè)區(qū)域,當(dāng)兩兩導(dǎo)通時(shí),通電的兩相繞組電流大小相等,方相反,電機(jī)轉(zhuǎn)矩為零的點(diǎn)分布在各個(gè)區(qū)域的邊界上;當(dāng)采用三三導(dǎo)通時(shí),三相繞組均通電,若電流最大相的電流為I,那么其它兩相電流為-I/2,此時(shí)電機(jī)轉(zhuǎn)矩為零的點(diǎn)分布在各個(gè)區(qū)域的中間位置,如圖3 所示。通過以上分析可以知道,要使轉(zhuǎn)子轉(zhuǎn)到某一個(gè)區(qū)域,采用三三導(dǎo)通的方法要比兩兩導(dǎo)通的方法更加合理。

某一個(gè)特定的區(qū)域,正常工作時(shí)需要通電的直流無刷電機(jī)繞組是一定的,如圖3 中的區(qū)域Ⅰ,兩兩導(dǎo)通時(shí)需A 相和B相繞組通電,要想產(chǎn)生正轉(zhuǎn)矩,A 相繞組應(yīng)通正電流,B 相繞組應(yīng)通負(fù)電流,記為“A+B-”,要產(chǎn)生負(fù)轉(zhuǎn)矩則“B+A-”,其它區(qū)域內(nèi)直流無刷電機(jī)繞組通電的情況如表1 所示。如果電機(jī)采用三三導(dǎo)通方式工作,可以根據(jù)反電勢(shì)很容易地得出繞組通電情況,這里就不再列舉。
直流無刷電機(jī)中較為重要的部件就是霍爾,因?yàn)榛魻柧哂蟹墙佑|式,安全性高,壽命,高穩(wěn)定的優(yōu)點(diǎn),且能抗油污抗灰塵等不良環(huán)境帶來的影響。所以,霍爾在直流無刷電機(jī)中是關(guān)鍵部件,其作用是很大的。選擇霍爾的好壞,對(duì)直流無刷電機(jī)的品質(zhì)有著直接的影響。用銻化銦(InSb)半導(dǎo)體制成霍爾元件靈敏度最高,也是使用最為廣泛的霍爾元件。無刷電機(jī)中的霍爾傳感器裝置采用銻化銦(InSb)霍爾元件或銻化銦(InSb)霍爾開關(guān)電路。霍爾傳感器通常與外部放大器電路連接,霍爾傳感器電路直接驅(qū)動(dòng)電機(jī)繞組,大大簡(jiǎn)化了電路。
工作原理:無刷直流電機(jī)使用永磁轉(zhuǎn)子將所需數(shù)量的霍爾傳感器設(shè)備放置在定子的適當(dāng)位置。其輸出與定子繞組的相應(yīng)電源電路相連。當(dāng)轉(zhuǎn)子經(jīng)過霍爾傳感器裝置附近時(shí),永磁體轉(zhuǎn)子的磁場(chǎng)使勵(lì)磁霍爾傳感器裝置輸出電壓打開定子繞組電源電路,向相應(yīng)的定子繞組供電,產(chǎn)生與轉(zhuǎn)子磁場(chǎng)極性相同的磁場(chǎng),并排斥轉(zhuǎn)子繼續(xù)旋轉(zhuǎn)。在下一個(gè)位置,前一個(gè)位置的霍爾傳感器裝置停止工作,下一個(gè)霍爾傳感器裝置打開,使下一個(gè)繞組通電,產(chǎn)生排斥磁場(chǎng),使轉(zhuǎn)子繼續(xù)轉(zhuǎn)動(dòng)。這樣一個(gè)循環(huán)來維持馬達(dá)的工作。
在這里,霍爾傳感器裝置作為位置傳感器來檢測(cè)轉(zhuǎn)子磁極的位置。它的輸出使定子繞組電源電路通斷,同時(shí)也起開關(guān)的作用。當(dāng)轉(zhuǎn)子磁極離開時(shí),前霍爾傳感器裝置停止工作,下一個(gè)裝置開始工作,使轉(zhuǎn)子磁極始終面對(duì)推斥磁鐵。磁場(chǎng)和霍爾傳感器器件起到了定子電流換向的作用。
霍爾傳感器開關(guān)鎖定電路直接驅(qū)動(dòng)電機(jī)。當(dāng)磁場(chǎng)刺激鐵磁材料時(shí),由于其高磁導(dǎo)率、低磁阻,磁力線集中在材料中。當(dāng)材料平均時(shí),磁力線的分布也是平均的。如果材料中有缺陷,如缺陷處有裂紋、孔等,則磁力線會(huì)彎曲,局部磁場(chǎng)會(huì)發(fā)生畸變。這種畸變可以通過霍爾傳感器探頭、位置、性能(孔或裂紋)和尺寸(如深度、寬度等)來檢測(cè)。該缺陷可以通過數(shù)據(jù)處理來識(shí)別。
三相直流無刷電機(jī)原理
三相無刷直流電機(jī)常采用兩兩導(dǎo)通的方式工作,兩兩導(dǎo)通指任意時(shí)刻逆變器只有2只開關(guān)管開通。無刷直流電機(jī)需要根據(jù)轉(zhuǎn)子位置來切換工作狀態(tài),也就是說換相點(diǎn)是無刷直流電機(jī)正常工作必不可少的信息。圖1為三相無刷直流電機(jī)換相點(diǎn)示意圖,為便于理解,特給出了反電勢(shì)以及相電流波形,圖中ea,eb,ec代表三相相反電勢(shì),由圖可見,對(duì)于三相無刷直流電機(jī),每個(gè)電周期內(nèi)有6個(gè)不同的換相點(diǎn),也就是說每個(gè)電周期內(nèi)電機(jī)換相6次。
霍爾傳感器常用來檢測(cè)無刷直流電機(jī)換相點(diǎn)。三相無刷直流電機(jī)需要3 個(gè)霍爾傳感器來檢測(cè)6 個(gè)不同的位置,霍爾傳感器的安裝有120° 安裝和60° 安裝2 種方式,120° 安裝指3 個(gè)霍爾傳感器互差120° (電角度),而60°安裝指3 個(gè)霍爾傳感器互差60° (電角度),2 種安裝方法對(duì)應(yīng)霍爾傳感器的輸出信號(hào)如圖2 所示,圖2 中霍爾信號(hào)跳變的位置就是換相點(diǎn)。2 種安裝方式最大的區(qū)別在于采用60 ° 安裝時(shí)可以輸出“000”和“111”信號(hào),而120° 安裝則不會(huì)輸出這2 個(gè)信號(hào),通過這一點(diǎn)可以判斷霍爾傳感器的安裝方式。
不管采用哪種安裝方式,輸出的霍爾信號(hào)將每個(gè)電周期分為6 個(gè)區(qū)域,當(dāng)轉(zhuǎn)子轉(zhuǎn)到某個(gè)區(qū)域時(shí),特定的繞組通電,無刷直流電機(jī)即可正常運(yùn)行,若霍爾信號(hào)與繞組關(guān)系不準(zhǔn)確,電機(jī)將無法工作,甚至?xí)斐呻姍C(jī)或逆變器損壞。下面介紹一種無刷直流電機(jī)霍爾信號(hào)與繞組關(guān)系自學(xué)習(xí)方法。
三相直流無刷電機(jī)轉(zhuǎn)矩可以由下式來計(jì)算:
T =eaia + ebib + ecicω式中:ea ,eb ,ec 為三相相反電勢(shì);ia ,ib ,ic 為三相相電流;ω 為電機(jī)角速度。空載時(shí),在電機(jī)繞組中通以固定電流,電機(jī)轉(zhuǎn)子將轉(zhuǎn)到某一位置并停止,此時(shí)電機(jī)產(chǎn)生的轉(zhuǎn)矩零圖3中,Ⅰ~Ⅵ表示霍耳傳感器將電周期分成的6 個(gè)區(qū)域,當(dāng)兩兩導(dǎo)通時(shí),通電的兩相繞組電流大小相等,方相反,電機(jī)轉(zhuǎn)矩為零的點(diǎn)分布在各個(gè)區(qū)域的邊界上;當(dāng)采用三三導(dǎo)通時(shí),三相繞組均通電,若電流最大相的電流為I,那么其它兩相電流為-I/2,此時(shí)電機(jī)轉(zhuǎn)矩為零的點(diǎn)分布在各個(gè)區(qū)域的中間位置,如圖3 所示。通過以上分析可以知道,要使轉(zhuǎn)子轉(zhuǎn)到某一個(gè)區(qū)域,采用三三導(dǎo)通的方法要比兩兩導(dǎo)通的方法更加合理。
某一個(gè)特定的區(qū)域,正常工作時(shí)需要通電的直流無刷電機(jī)繞組是一定的,如圖3 中的區(qū)域Ⅰ,兩兩導(dǎo)通時(shí)需A 相和B相繞組通電,要想產(chǎn)生正轉(zhuǎn)矩,A 相繞組應(yīng)通正電流,B 相繞組應(yīng)通負(fù)電流,記為“A+B-”,要產(chǎn)生負(fù)轉(zhuǎn)矩則“B+A-”,其它區(qū)域內(nèi)直流無刷電機(jī)繞組通電的情況如表1 所示。如果電機(jī)采用三三導(dǎo)通方式工作,可以根據(jù)反電勢(shì)很容易地得出繞組通電情況,這里就不再列舉。
 、
、
線性霍爾用于三相無刷電機(jī) AKM 旭化成HW-101A http://www.gjak.cn/Product/054267313.html
- 上一篇:基于瑞薩電子電機(jī)控制,RAMDA算法技術(shù)特點(diǎn)及基本原理介紹 2020/7/11
- 下一篇:怎么解決直流無刷電機(jī)(馬達(dá))的過載? 2020/7/10
