
如何避免步進電機(馬達)的失步
提起步進電機,對于控制行業的工程大師們來說應該再熟悉不了了!它的誤差不會長時間累積,能實現精確的定位,控制比伺服的還要簡單等優點,但步進電機精確控制的前提是電機不能發生失步,怎么才能不讓步進電機失步?
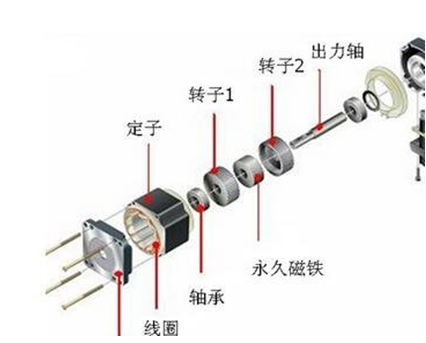
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制電機。在沒有發生失步情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數并不受負載變化的影響,當步進電機接收到一個脈沖信號時,電機就按設定的方向轉一個固定的角度(步進角或步距角),通過控制脈沖數和脈沖頻率來控制電機角位移量及馬達轉速從而達到精確的開環控制。另外,步進電機每走一步所轉過的角度與理論步距之間總有一些誤差,從某一步到任何一步,也總有誤差,但是,步進電機每轉一周的步數相同,在不失步的情況下,步距誤差不會長時間累積。
上面提到的都是在不失步的時候,那么如何才能避免失步呢?首先我們要知道造成電機失步的因素:
1、電機負載慣性較大;
2、轉子的平均速度高于定子磁場的平均旋轉速度;
3、轉子加速度慢于步進電機的旋轉磁場;
4、步進電機產生共振。
轉子加速度慢于步進電機的旋轉磁場即轉子速度低于換相速度時,電機會產生失步,這是因為輸入電機的電能不足,產生的力矩無法使轉子速度跟上定子磁場的旋轉速度,從而引起失步。轉子平均速度高于定子磁場平均旋轉速度,這是定子通電勵磁的時間較長,大于步進所需的時間,轉子在步進過程中獲得過多的能量,導致電機產生的轉矩過大從而引起電機越步。

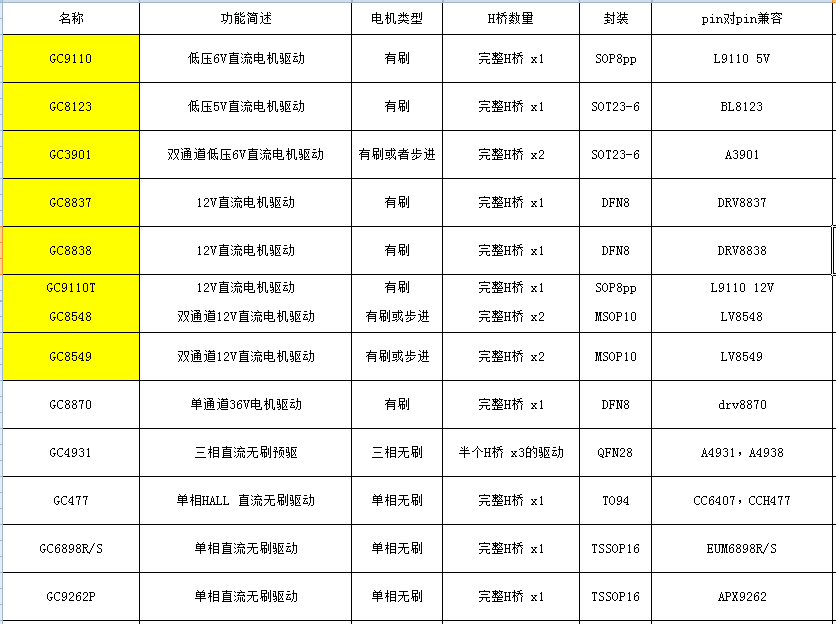
以上導致步進電機失步的原因實際上是步進驅動器選擇不當而導致,只有選擇正確合適的步進驅動器才能使步進電機發揮其控制精確的優點。選擇合適的驅動器需要根據電機的電流,配用大于或等于此電流的驅動器。如果需要低振動或者高精度時,可配用細分型驅動器。對大轉矩電機,盡可能用高電壓型驅動器,以得到良好的高速性能。屆時對于驅動電源,多數人直接使用開關電源作為驅動電源,but,一般最好不要使用開關電源,特別是大的力矩電機,除非選用比需要的功率大一倍以上的開關電源。因為,電機工作時是大電感型負載,會對電源端形成瞬間地高壓。而開關電源的過載性能不好,會保護關斷,而且精密的穩壓性能又不需要,有時可能造成開關電源和驅動器的損壞。對于步進電機的驅動電源,可以用常用的環形或R 型變壓器變壓的直流電源。
步進電機產生共振是因為電機接收的脈沖頻率等于步進電機的固有頻率,此頻率與驅動器的細分有關聯。我們一般使用步進電機時,驅動器的細分能力很重要,共振范圍越小越好。對于電機負載慣性較大是由于電機超載而引起,因此在使用時需注意不要讓電機過載即可避免。
要知道過載是否,我們必須了解電機的負載特性等基本參數,深圳市錦鋒科技有限公司專業提供直流電機芯片,一級代理,價格優惠,品質保證,產品類別齊全,一站式供應,可提供技術支持!
- 上一篇:常用電機控制電路圖排行榜 2020/8/25
- 下一篇:筋膜槍電機驅動MOS管ZMD68403S 2020/8/24
